Initial conditions
Contains the classes to define the initial conditions such as the geometry of the physical domain, the mesh refinement or an initial field with a gaussian distribution. It generates symbolic expressions of the coordinates and initial field distribution.
Domain
In pTatin3d, the physical domain where the simulation is performed is defined by the coordinate system showed in the figure below.
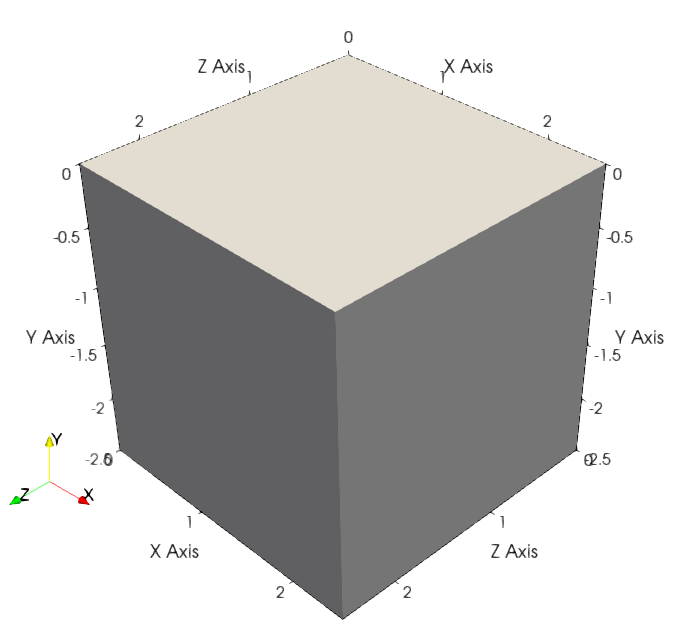
The following code describes the physical domain. While most of the usage of this class is for 3 dimensional domains, it can also be used for 2 dimensional and 1 dimensional domains.
Eulerian Domain (with free-surface)
- class genepy.Domain(dim: int, minCoor: ndarray, maxCoor: ndarray, size: ndarray, coor=None)
- class Domain(dim, minCoor, maxCoor, size, coor=None)
Class to build a physical domain. Compatible with 1D, 2D and 3D domains. Coordinates (symbolic and numeric) are instantiated by the class constructor using provided coordinates or creating new if not provided.
- Parameters:
dim (int) – dimension of the domain (can be 1, 2 or 3)
minCoor (np.ndarray) – minimum coordinates of the domain
maxCoor (np.ndarray) – maximum coordinates of the domain
size (np.ndarray) – size of the domain (number of points in each direction)
coor (np.ndarray) – coordinates of the domain (numerical), optional
Example
dim = 3 minCoord = np.array([0,-1,-0.5], dtype=np.float64) maxCoord = np.array([1,0,0.5], dtype=np.float64) size = np.array([9,5,17], dtype=np.int32) domain = genepy.Domain(dim,minCoord,maxCoord,size)
Attributes
- dim: int
Dimension of the domain
- O: np.ndarray
Minimum coordinates of the domain, expected shape:
(dim,)and dtype:np.float64
- L: np.ndarray
Maximum coordinates of the domain, expected shape:
(dim,)and dtype:np.float64
- O_num: np.ndarray
Minimum coordinates of the domain, expected shape:
(dim,)and dtype:np.float64
- L_num: np.ndarray
Maximum coordinates of the domain, expected shape:
(dim,)and dtype:np.float64
- n: np.ndarray
Size of the domain (number of nodes in each direction), expected shape:
(dim,)and dtype:np.int32
- nv: int
Total number of nodes in the domain
- num_coor: tuple
Numerical coordinates of the domain created by
numerical_coordinates(). Tuple(X),(X,Y)or(X,Y,Z)(depending on the number of dimensions) with each direction being of type ndarray and shapeX.shape = (*n).
- sym_coor: tuple
Symbolic coordinates of the domain. Tuple
('x'),('x','y')or('x','y','z')
Methods
- numerical_coordinates(self)
Computes the numerical coordinates of the domain as a uniform grid. Compatible with 1D, 2D and 3D. Attach the coordinates to the attribute
num_cooras a tuple:self.num_coor = (X,Y,Z)with each direction being of the shapeX.shape = (self.n[0],self.n[1],self.n[2]). Tuples are immutable, so to modify the coordinates, convert them to a list first and restore them as tuple once done.
- shape_coor(self)
Reshapes the coordinates from
(n[0],n[1],n[2])to(nv,dim)
ALE Domain
In case an ALE simulation is performed, the domain can be defined as a moving domain.
Therefore, its minumum and maximum coordinates will change in time and expressions relying
on the size of the domain need to consider this.
To do so, the following class introduce symbolic representation of the domain with the symbols
"Ox", "Oy", "Oz" for the origin of the domain and "Lx", "Ly", "Lz" for the size of the domain.
- class genepy.DomainALE(dim: int, minCoor: ndarray, maxCoor: ndarray, size: ndarray, coor=None)
- class DomainALE(dim, minCoor, maxCoor, size, coor=None)
Class to build a physical domain for ALE simulations. This class creates sympy symbols for the min and max coordinates of the domain to evaluate expressions in which the size of the domain is a variable (typically ALE simulations). Inherits from
Domainclass.- Parameters:
dim (int) – dimension of the domain (can be 1, 2 or 3)
minCoor (np.ndarray) – minimum coordinates of the domain
maxCoor (np.ndarray) – maximum coordinates of the domain
size (np.ndarray) – size of the domain (number of points in each direction)
coor (np.ndarray) – coordinates of the domain (numerical), optional
Attributes
- O_num: np.ndarray
Symbols of the minimum coordinates of the domain
["Ox","Oy","Oz"]
- L_num: np.ndarray
Symbols of the maximum coordinates of the domain
["Lx","Ly","Lz"]
Other attributes are inherited from the
Domainclass.
- sprint_option(self, model_name: str)
Returns a string formatted for pTatin3d input file using PETSc options format.
- Parameters:
model_name (str) – name of the model to include in the options
ale_rm_component (list) – list of components to remove from the mesh. Valid values are
"x","y"and"z"
- Returns:
string with the options
Mesh refinement
This module contains the class describing the mesh refinement.
- class genepy.MeshRefinement(Domain, refinement_params)
- class MeshRefinement(Domain, refinement_params)
Class to refine a mesh in one or more directions. The refinement is done by linear interpolation of the coordinates of the mesh in the specified directions. The class is a subclass of
Domain- Parameters:
Domain (Domain) – domain to refine
refinement_params (dict) – dictionary containing the refinement parameters. The dictionary must have the following structure:
refinement_params = {"x": {"x_initial": np.array([...],dtype=np.float64), "x_refined": np.array([...],dtype=np.float64)}, "y": {"x_initial": np.array([...],dtype=np.float64), "x_refined": np.array([...],dtype=np.float64)}, "z": {"x_initial": np.array([...],dtype=np.float64), "x_refined": np.array([...],dtype=np.float64)}
or
refinement_params = {"x": {"mesh_fraction": np.array([...],dtype=np.float64), "x_refined": np.array([...],dtype=np.float64)}}
The keys of the dictionary are the directions to refine (
"x","y","z") and the values are dictionaries with the keys:"x_initial"and"x_refined""mesh_fraction"and"x_refined"
In the first case, the values of these keys are numpy arrays of the initial and refined coordinates in the specified direction. In the second case, the values of these keys are numpy arrays of the mesh fractions and the refined coordinates in the specified direction. The arrays must have the same shape.
Attributes
- params: dict
Refinement parameters
- dirmap: dict
Dictionary to map the direction to the index of the direction in the mesh i.e.,
"x":0,"y":1,"z":2
Methods
- normalize(x, dim)
Normalize the coordinates of the mesh in the specified direction
- Parameters:
x (np.ndarray) – coordinates to normalize
dim (int) – direction of the coordinates to normalize
- Returns:
normalized coordinates
- Return type:
np.ndarray
- refine_direction(dim, x_initial, x_refined)
Refine the mesh in the specified direction using linear interpolation.
num_cooris updated with the refined coordinates.- Parameters:
dim (int) – direction of the mesh to refine (
0:x,1:y,2:z)x_initial (np.ndarray) – initial coordinates
x_refined (np.ndarray) – refined coordinates
Rotation
This module contains the class to perform rotations of single vectors, vector fields and referential in 2D and 3D.
- class genepy.Rotation(dim, theta, axis=array([0, 1, 0]))
- class Rotation(dim, theta, axis=np.array([0, 1, 0]))
Class to perform rotation of a referential in 2D or 3D.
- Parameters:
dim (int) – dimension of the rotation (can be 2 or 3)
theta (float) – angle of rotation in radians
axis (np.ndarray) – axis of rotation (default is y-axis)
Example
dim = 3 # dimension theta = np.deg2rad(-90.0) # angle of rotation axis = np.array([0,1,0], dtype=np.float64) # axis of rotation # Create class instance Rotation = genepy.Rotation(dim,theta,axis)
Attributes
- dim: int
Spatial dimension in which the rotation is performed
- theta: float
Angle of rotation in radians
- axis: np.ndarray
Axis of rotation, expected shape:
(dim,)and dtype:np.float64
Methods
- rotate_referential(self, coor, O, L, ccw=True)
Rotate the referential of the coordinates \(\mathbf{x}\) given the rotation matrix \(\boldsymbol R\). The referential is first translated to be centred on \(\mathbf{0}\), then rotated and finally translated back to its original position.
\[\begin{split}\mathbf x_T &= \mathbf x - \frac{1}{2}(\mathbf L + \mathbf O) \\ \mathbf x_{TR} &= \boldsymbol R \mathbf x_T \\ \mathbf x_R &= \mathbf x_{TR} + \frac{1}{2}(\mathbf L + \mathbf O)\end{split}\]- Parameters:
coor (np.ndarray) – coordinates to be rotated of the shape
(npoints,dim)O (np.ndarray) – origin of the referential of the shape
(dim,)L (np.ndarray) – maximum coordinates of the referential of the shape
(dim,)ccw (bool) – rotate counter-clockwise (default is True)
- Returns:
coorR rotated coordinates of the shape
(npoints,dim)
- rotate_vector(self, R, u, ccw=True)
Rotate vector(s) \(\mathbf u\) given the rotation matrix \(\boldsymbol R\).
Warning
This is not a rotation of the vector field, but a rotation of the vectors themselves. To rotate the vector field, have a look at how it is done in
evaluate_velocity_symbolic().- Parameters:
R (np.ndarray) – rotation matrix of the shape
(dim,dim)u (np.ndarray) – vector(s) to be rotated of the shape
(npoints,dim)ccw (bool) – rotate counter-clockwise (default is True)
- Returns:
u_R rotated vector(s) of the shape
(npoints,dim)
- rotation_matrix(self)
Return the rotation matrix depending on the
spatial dimension. callsrotation_matrix_2d()orrotation_matrix_3d().- Returns:
R rotation matrix in 2D or 3D of the shape
(2,2)or(3,3)
Gaussian
This module contains the class to evaluate gaussian distributions of a field in 2D. It is generally used to define the initial strain distribution to place weak zones in the domain.
- class genepy.GaussianConstructor(Domain: Domain, A: float, a: float | list[float] | ndarray, expression: Expr | list[Expr] | ndarray)
- class GaussianConstructor(Domain, A, a, expression)
Child class of
Gaussianto build a function describing a gaussian distribution defined by:\[g(\mathbf a, \mathbf x) = A \exp\left( - \mathbf a \cdot \mathbf x \cdot \mathbf x \right)\]where \(\mathbf a\) is an array of coefficients such that \(\mathbf a = [a_1,a_2,...,a_n]\), \(\mathbf x\) is an array such that \(\mathbf x = [x_1,x_2,...,x_n]\) where \(x_i, \, i = 1,2,...,n\) can be single variables or mathematical functions and \(A\) is the amplitude of the gaussian.
This class is low level and should be called by the user to create its own gaussian distribution if not already available with the child classes.
- Parameters:
Domain (Domain) – instance of the Domain class
A (float) – amplitude of the gaussian
a (float | list | numpy.ndarray) – gaussian extent coefficient(s). Can be a single float, a list or a numpy array.
expression (sympy.Expr | list | numpy.ndarray) – expression(s) of the gaussian. Can be a single expression, a list or a numpy array.
- evaluate_gaussian()
Evaluate numerically the expression of the gaussian distribution. Uses the method
sympy.lambdify()to convert the symbolic expression to a python callable.
- gaussian()
Compute the gaussian distribution for the given expression(s). Make use of the rule \(\exp(a+b) = \exp(a)\exp(b)\) to build the final multidimensional expression. The method is called by the class constructor and does not require to be called by the user.
- class genepy.Gaussian2D(Domain: Domain, A: float, a: float, b: float, x0: float, z0: float, Rotation: Rotation | None = None)
- class Gaussian2D(Domain, A, a, b, x0, z0, Rotation=None)
Child class of
GaussianConstructorto build a 2D gaussian distribution defined by:\[g((a,b);(x,z)) = A \exp\left( -\left( a(x-x_0)^2 + b(z-z_0)^2 \right) \right)\]where \(a\) and \(b\) are coefficients controlling the shape of the gaussian in the \(x\) and \(z\) directions respectively, \(x_0\) and \(z_0\) are the coordinates of the centre of the gaussian and \(A\) is the amplitude of the gaussian.
- Parameters:
Domain (Domain) – instance of the Domain class
A (float) – amplitude of the gaussian
a (float) – gaussian extent coefficient in the \(x\) direction
b (float) – gaussian extent coefficient in the \(z\) direction
x0 (float) – \(x\) coordinate of the centre of the gaussian
z0 (float) – \(z\) coordinate of the centre of the gaussian
Rotation (Rotation) – instance of the Rotation class (optional) to rotate the centre of the gaussian
- Example:
import numpy as np import genepy as gp # Domain O = np.array([ 0.0, -250e3, 0.0 ], dtype=np.float64) L = np.array([ 600e3, 0.0, 300e3 ], dtype=np.float64) n = np.array([ 64, 32, 64 ], dtype=np.int32) Domain = gp.Domain(3,O,L,n) a = 0.5 * 6.0e-5**2 b = 0.5 * 6.0e-5**2 x0 = 0.5*Domain.L_num[0] z0 = 0.5*Domain.L_num[2] Gaussian = gp.Gaussian2D(Domain,1.0,a,b,x0,z0) print(Gaussian) # prints the expression and the parameters of the gaussian
If one wants to numerically evaluate the gaussian distribution use:
Gaussian.evaluate_gaussian()
- class genepy.Gaussian3D(Domain: Domain, A: float, a: float, b: float, c: float, x0: float, y0: float, z0: float, Rotation: Rotation | None = None)
- class Gaussian3D(Domain, A, a, b, c, x0, y0, z0, Rotation=None)
Child class of
GaussianConstructorto build a 3D gaussian distribution defined by:\[g((a,b,c);(x,y,z)) = A \exp\left( -\left( a(x-x_0)^2 + b(y-y_0)^2 + c(z-z_0)^2 \right) \right)\]where \(a\), \(b\) and \(c\) are coefficients controlling the shape of the gaussian in the \(x\), \(y\) and \(z\) directions respectively, \(x_0\), \(y_0\) and \(z_0\) are the coordinates of the centre of the gaussian and \(A\) is the amplitude of the gaussian.
- Parameters:
Domain (Domain) – instance of the Domain class
A (float) – amplitude of the gaussian
a (float) – gaussian extent coefficient in the \(x\) direction
b (float) – gaussian extent coefficient in the \(y\) direction
c (float) – gaussian extent coefficient in the \(z\) direction
x0 (float) – \(x\) coordinate of the centre of the gaussian
y0 (float) – \(y\) coordinate of the centre of the gaussian
z0 (float) – \(z\) coordinate of the centre of the gaussian
Rotation (Rotation) – instance of the Rotation class (optional) to rotate the centre of the gaussian
- Example:
import numpy as np import genepy as gp # Domain O = np.array([ 0.0, -250e3, 0.0 ], dtype=np.float64) L = np.array([ 600e3, 0.0, 300e3 ], dtype=np.float64) n = np.array([ 64, 32, 64 ], dtype=np.int32) Domain = gp.Domain(3,O,L,n) a = 0.5 * 6.0e-5**2 b = 0.5 * 6.0e-5**2 c = 0.5 * 6.0e-5**2 x0 = 0.5*Domain.L_num[0] y0 = 0.5*Domain.L_num[1] z0 = 0.5*Domain.L_num[2] Gaussian = gp.Gaussian3D(Domain,1.0,a,b,c,x0,y0,z0) print(Gaussian) # prints the expression and the parameters of the gaussian
If one wants to numerically evaluate the gaussian distribution use:
Gaussian.evaluate_gaussian()
- class genepy.GaussianPlane(Domain: Domain, A: float, a: float, coeff: ndarray)
- class GaussianPlane(Domain, A, a, plane_coeff)
Child class of
GaussianConstructorto build a 3D gaussian distribution around a plane defined by:\[g( a, D(\mathbf x) ) = A \exp\left( - a D(\mathbf x)^2 \right)\]where \(a\) is the coefficient controlling the shape of the gaussian around the plane and
\[D(\mathbf x) = \frac{n_0 x + n_1 y + n_2 z + d}{\sqrt{n_0^2 + n_1^2 + n_2^2}} = \frac{\mathbf n \cdot \mathbf x + d}{|| \mathbf n ||} \]is the equation describing the distance between a point of coordinates \(\mathbf x\) and the plane defined by the normal vector \(\mathbf n = [n_0, n_1, n_2]\) and the parameter \(d\).
- Parameters:
Domain (Domain) – instance of the Domain class
A (float) – amplitude of the gaussian
a (float) – gaussian extent coefficient
plane_coeff (np.ndarray) – plane coefficients:
numpy.array([n_0, n_1, n_2, d])where \(n_0 x + n_1 y + n_2 z + d = 0\)
- Example:
import numpy as np import genepy as gp # Domain O = np.array([ 0.0, -250e3, 0.0 ], dtype=np.float64) L = np.array([ 600e3, 0.0, 300e3 ], dtype=np.float64) n = np.array([ 64, 32, 64 ], dtype=np.int32) Domain = gp.Domain(3,O,L,n) # gaussian extent coefficient a = 0.5 * 6.0e-5**2 # points defining the plane pt_A = np.array([200.0, 0.0, 0.0], dtype=np.float64) * 1e3 pt_B = np.array([200.0, 0.0, 300.0], dtype=np.float64) * 1e3 pt_C = np.array([600.0, -100.0, 0.0], dtype=np.float64) * 1e3 # normal vector to the plane normal = np.cross(pt_B - pt_A, pt_C - pt_A) # d parameter d = -np.dot(normal,pt_A) plane_coeff = np.array([normal[0], normal[1], normal[2], d], dtype=np.float64) Gaussian = gp.GaussianPlane(Domain,1.0,a,plane_coeff)
- class genepy.GaussianCircle(Domain: Domain, A: float, a: float, xc: float, zc: float, r: float, Rotation: Rotation | None = None)
- class GaussianCircle(Domain, A, a, xc, zc, r, Rotation=None)
Child class of
GaussianConstructorto build a 2D gaussian distribution around a circle defined by:\[g( a, D(\mathbf x) ) = A \exp\left( - a D(\mathbf x)^2 \right)\]where \(a\) is the coefficient controlling the shape of the gaussian around the circle and
\[D(\mathbf x) = \sqrt{(x-x_c)^2 + (z-z_c)^2} - r\]is the equation describing the distance between a point of coordinates \(\mathbf x\) and the circle defined by the centre \((x_c,z_c)\) and the radius \(r\).
- Parameters:
Domain (Domain) – instance of the Domain class
A (float) – amplitude of the gaussian
a (float) – gaussian extent coefficient
xc (float) – \(x\) coordinate of the centre of the circle
zc (float) – \(z\) coordinate of the centre of the circle
r (float) – radius of the circle
Rotation (Rotation) – instance of the Rotation class (optional) to rotate the centre of the circle
- Example:
import numpy as np import genepy as gp # Domain O = np.array([ 0.0, -250e3, 0.0 ], dtype=np.float64) L = np.array([ 600e3, 0.0, 300e3 ], dtype=np.float64) n = np.array([ 64, 32, 64 ], dtype=np.int32) Domain = gp.Domain(3,O,L,n) # gaussian extent coefficient coeff = 0.5*6.0e-5**2 # centre of the circle xc = 0.5*Domain.L_num[0] zc = 0.5*Domain.L_num[2] # radius of the circle r = 0.25*Domain.L_num[2] Gaussian = gp.GaussianCircle(Domain,1.0,coeff,xc,zc,r)
- class genepy.GaussiansOptions(gaussians: list[Gaussian], blocksize: int = 10)
- class GaussiansOptions(gaussians, blocksize=10)
Class to generate the options for the input file of pTatin3d. The class takes a list of gaussians and can sum them in blocks of size blocksize to reduce the number of options. The class instance can be used to generate the options for the gaussian distributions. If the gaussians are used to set an initial plastic strain, it should be passed to the class
InitialPlasticStrain.- Parameters:
gaussians (list) – list of Gaussian instances
blocksize (int) – (Optional) size of the block to sum the gaussians.
- Example:
import numpy as np import genepy as gp # Domain O = np.array([ 0.0, -250e3, 0.0 ], dtype=np.float64) L = np.array([ 600e3, 0.0, 300e3 ], dtype=np.float64) n = np.array([ 64, 32, 64 ], dtype=np.int32) Domain = gp.Domain(3,O,L,n) # gaussian distribution coeff = 0.5*6.0e-5**2 x0 = [0.25 * Domain.L_num[0], 0.75 * Domain.L_num[0]] z0 = [0.25 * Domain.L_num[2], 0.75 * Domain.L_num[2]] gaussians = [] for i in range(2): gaussians.append(gp.Gaussian2D(Domain,1.0,coeff,coeff,x0[i],z0[i])) Gopt = gp.GaussiansOptions(gaussians,blocksize=5)
Pass the instance
Goptsto the classInitialPlasticStrain:IPS = gp.InitialPlasticStrain(Gopt)
Plastic strain
This module contains the class to generate options for the initial plastic strain.
- class genepy.InitialPlasticStrain(strain_expressions: Gaussian)
- class InitialPlasticStrain(strain_expressions)
Class to generate options for the initial plastic strain.
- Parameters:
strain_expressions – instance of the
genepy.Gaussianclass describing the initial plastic strain
Methods:
Heat source
This module contains the class to generate options for the initial heat source when set to
genepy.EnergySourceMaterialPointValue.
- class genepy.InitialHeatSource(hs_expression)
- class InitialHeatSource(hs_expression)
Class to generate options for the initial heat source when using the class
genepy.EnergySourceMaterialPointValue. The heat source should be given as an expression or an instance of thegenepy.Gaussianclass. If the expression is a constant value, prefer to use thegenepy.EnergySourceConstantclass.Example:
In the following example we assume that the
Domainclass is already instantiated.import numpy as np import genepy as gp # shape of the gaussian coeff = 0.5 * 6.0e-5**2 a = np.array([coeff],dtype=np.float64) b = np.zeros(shape=(1),dtype=np.float64) c = np.array([coeff],dtype=np.float64) # position of the centre of the gaussian x0 = np.array([0.5 * (Domain.L_num[0] - Domain.O_num[0])], dtype=np.float64) z0 = np.array([0.5 * (Domain.L_num[2] - Domain.O_num[2])], dtype=np.float64) # amplitude of the gaussian (heat source) A = np.array([1.5e-6],dtype=np.float64) # Create gaussian object Gaussian = gp.Gaussian(Domain,1,A,a,b,c,x0,z0) Gaussian.evaluate_gaussians() # Create initial heat source Hini = gp.InitialHeatSource(Gaussian)
- param hs_expression:
heat source expression (str or sympy expression) for a single expression or an instance of the
genepy.Gaussianclass
Methods:
ICs pTatin3d options generation
This module contains the class to generate the options for the initial conditions of a 3D model running GENE3D in pTatin3d.
- class genepy.InitialConditions(Domain: Domain, velocity, model_name: str = 'model_GENE3D', **kwargs)
- class InitialConditions(Domain, velocity, model_name='model_GENE3D', **kwargs)
Abstract class to generate options for pTatin3d model initial conditions.
- Parameters:
Domain (Domain) – instance of the Domain class
velocity – velocity function (str or sympy expression)
model_name (str) – name of the model (default: model_GENE3D)
kwargs – keyword arguments
Attributes
- model_name: str
Name of the model to include in the options
- u: velocity
Velocity function (str or sympy expression)
- kwargs: dict
Keyword arguments
- possible_kwargs: list
Possible keyword arguments
mesh_refinement: instance of the
genepy.MeshRefinementclass.initial_strain: instance of the
genepy.InitialPlasticStrainclassinitial_heat_source: instance of the
genepy.InitialHeatSourceclass
Methods: